Status Labels¶
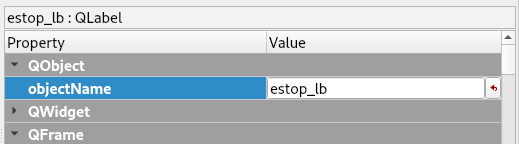
Status labels come in two forms, single status items like Machine Status and multiple status labels like the joint dictionary which has multiple items and displays for all joints. Multiple status labels use a number identifier to select the axis, joint or spindle information wanted. When creating a status label set the objectName to the status you want.
Precision¶
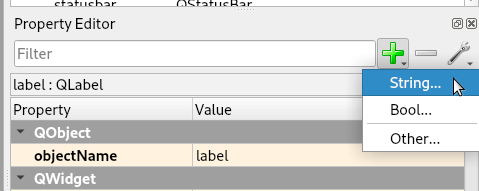
Labels that return float values default precision is 3 for metric and 4 for inch.
To override the default, select the label then click on the Green Plus sign in the Property Editor and select String…
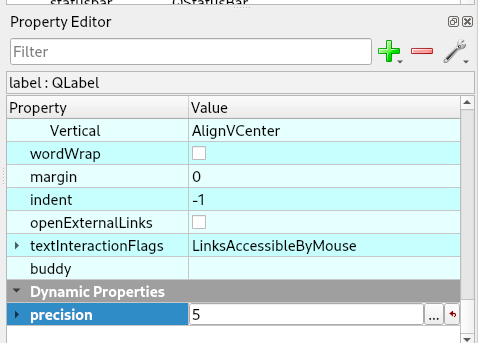
Set the Property Name to precision.
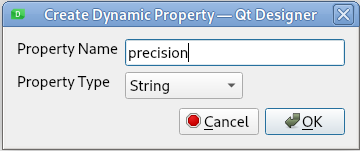
Set the Value to how many decimal places you want for that status label.
For more information about status labels read the LinuxCNC Python Interface Status Attributes.
Status Labels¶
acceleration_lb |
flood_lb |
pocket_prepped_lb |
active_queue_lb |
gcodes_lb |
probe_tripped_lb |
adaptive_feed_enabled_lb |
g5x_index_lb |
probe_val_lb |
angular_units_lb |
ini_filename_lb |
probed_position_lb |
axis_mask_lb |
inpos_lb |
probing_lb |
block_delete_lb |
input_timeout_lb |
program_units_lb |
call_level_lb |
interp_state_lb |
queue_lb |
command_lb |
interpreter_errcode_lb |
queue_full_lb |
current_line_lb |
joints_lb |
rapidrate_lb |
current_vel_lb |
kinematics_type_lb |
read_line_lb |
cycle_time_lb |
linear_units_lb |
rotation_xy_lb |
debug_lb |
lube_lb |
settings_lb |
delay_left_lb |
lube_level_lb |
spindles_lb |
distance_to_go_lb |
max_acceleration_lb |
state_lb |
echo_serial_number_lb |
max_velocity_lb |
task_mode_lb |
enabled_lb |
mcodes_lb |
task_paused_lb |
estop_lb |
mist_lb |
task_state_lb |
exec_state_lb |
motion_line_lb |
tool_in_spindle_lb |
feed_hold_enabled_lb |
motion_mode_lb |
tool_from_pocket_lb |
feed_override_enabled_lb |
motion_type_lb |
tool_offset_lb |
feedrate_lb |
optional_stop_lb |
|
file_lb |
paused_lb |
Note
You don’t have to use all the labels, the ones found will be
Axis Status¶
The Axis status contains status items for 9 axes. Replace the _n_ with the number of the axis. Axis numbers start at 0 and go through to 8. Returns a float.
axis_n_max_position_limit_lb |
axis_n_min_position_limit_lb |
axis_n_velocity_lb |
axis_n_vel_per_min_lb |
Note
The Axis velocity label only reports back jogging speed, use the joint velocity label for speed.
Joint Status¶
The Joint status contains status items for 16 joints. Replace the _n_ with the number of the joint. Joint numbers start at 0 and go through to 15.
joint_backlash_n_lb |
joint_input_n_lb |
joint_min_position_limit |
joint_enabled_n_lb |
joint_jointType_n_lb |
joint_in_soft_limit_n_lb |
joint_fault_n_lb |
joint_max_ferror_n_lb |
joint_output_n_lb |
joint_ferror_current_n_lb |
joint_max_hard_limit_n_lb |
joint_override_limits_n_lb |
joint_ferror_highmark_n_lb |
joint_max_position_limit_n_lb |
joint_units_n_lb |
joint_homed_n_lb |
joint_max_soft_limit_n_lb |
joint_vel_sec_n_lb |
joint_vel_min_n_lb |
joint_homing_n_lb |
joint_min_ferror_n_lb |
joint_inpos_n_lb |
joint_min_hard_limit_n_lb |
Special Labels¶
Run from line label
start_line_lb
Axis machine position labels no offsets. Returns a float.
actual_lb_x |
actual_lb_y |
actual_lb_z |
actual_lb_a |
actual_lb_b |
actual_lb_c |
actual_lb_u |
actual_lb_v |
actual_lb_w |
Axis position labels including all offsets. Returns a float.
dro_lb_x |
dro_lb_y |
dro_lb_z |
dro_lb_a |
dro_lb_b |
dro_lb_c |
dro_lb_u |
dro_lb_v |
dro_lb_w |
Axis homed labels
home_lb_0 |
home_lb_1 |
home_lb_2 |
home_lb_3 |
home_lb_4 |
home_lb_5 |
home_lb_6 |
home_lb_7 |
home_lb_8 |
Offsets for the currently active G5x coordinate system. Returns a float.
g5x_lb_x |
g5x_lb_y |
g5x_lb_z |
g5x_lb_a |
g5x_lb_b |
g5x_lb_c |
g5x_lb_u |
g5x_lb_v |
g5x_lb_w |
Offsets for G92. Returns a float.
g92_lb_x |
g92_lb_y |
g92_lb_z |
g92_lb_a |
g92_lb_b |
g92_lb_c |
g92_lb_u |
g92_lb_v |
g92_lb_w |
Current Tool Offsets. Returns a float.
tool_offset_lb_0 |
tool_offset_lb_1 |
tool_offset_lb_2 |
tool_offset_lb_3 |
tool_offset_lb_4 |
tool_offset_lb_5 |
tool_offset_lb_6 |
tool_offset_lb_7 |
tool_offset_lb_8 |
Note
see the Controls page for axis numbering
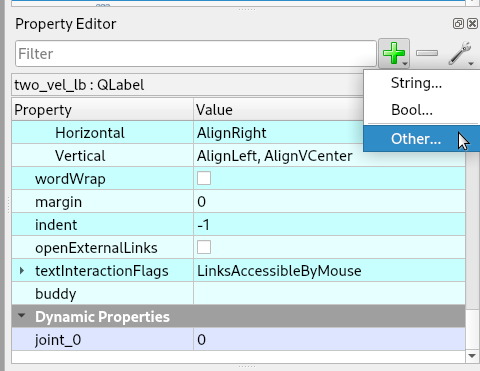
Tool velocity using two perpendicular joint velocities.
Name the label perp_vel_lb and add two string Dynamic Properties called joint_0 and joint_1 and set the values to the perpendicular joint numbers you want to calculate.
Comming soon: Tool teeth label and Feed per Tooth label… stay tuned.
Spindle Status¶
The Spindle status contains status items for 9 spindles. Replace the _n_ with the number of the spindle. Spindle numbers start at 0 and go through to 8.
spindle_brake_n_lb |
spindle_direction_n_lb |
spindle_enabled_n_lb |
spindle_override_enabled_n_lb |
spindle_speed_n_lb |
spindle_override_n_lb |
spindle_homed_n_lb |
spindle_orient_state_n_lb |
spindle_orient_fault_n_lb |
spindle_actual_speed_lb |
Note
Spindle speed is the commanded speed not the actual speed if an override is in effect.
I/O Status¶
The I/O status contains status items for 64 I/O’s. Replace the _n_ with the number of the joint. Joint numbers start at 0 and go through to 63. Analog I/O returns a float.
ain_n_lb |
aout_n_lb |
din_n_lb |
dout_n_lb |
Tool Table Status¶
The Tool Table status contains status items for all the tools in the tool table. Replace the _n_ with the position in the tool table.
tool_table_id_n_lb |
tool_table_xoffset_n_lb |
tool_table_yoffset_n_lb |
tool_table_zoffset_n_lb |
tool_table_aoffset_n_lb |
tool_table_boffset_n_lb |
tool_table_coffset_n_lb |
tool_table_uoffset_n_lb |
tool_table_voffset_n_lb |
tool_table_woffset_n_lb |
tool_table_diameter_n_lb |
tool_table_frontangle_n_lb |
tool_table_backangle_n_lb |
tool_table_orientation_n_lb |